Detailed Description
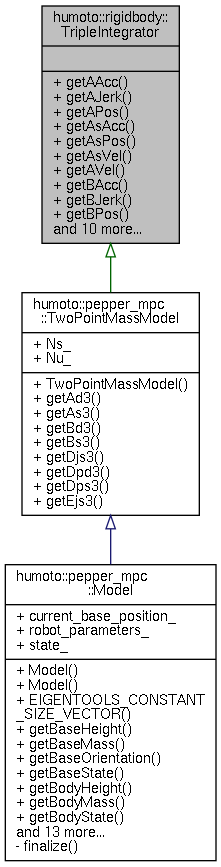
Triple integrator class Class supports arbitrary number of integrators in the system.
This class generates matrices of the following systems:
1) controlled by acceleration x(k+1) = A x(k) + B ddx(k+1) dddx(k) = D x(k) + E ddx(k+1)
2) controlled by velocity x(k+1) = A x(k) + B dx(k+1) dddx(k) = D x(k) + E dx(k+1)
3) controlled by position x(k+1) = A x(k) + B x(k+1) dddx(k) = D x(k) + E x(k+1)
4) controlled by jerk x(k+1) = A x(k) + B dddx(k+1)
Definition at line 37 of file triple_integrator.h.
#include <triple_integrator.h>
Static Public Member Functions | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getAAcc (const double T) |
| Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getAJerk (const double T) |
| Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getAPos (const double T) |
| Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getAsAcc (const double T, const double Ts) |
| Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getAsPos (const double T, const double Ts) |
| Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getAsVel (const double T, const double Ts) |
| Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getAVel (const double T) |
| Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getBAcc (const double T) |
| Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getBJerk (const double T) |
| Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getBPos (const double T) |
| Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getBsAcc (const double T, const double Ts) |
| Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getBsPos (const double T, const double Ts) |
| Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getBsVel (const double T, const double Ts) |
| Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getBVel (const double T) |
| Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getDAcc (const double T) |
| Create D matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getDPos (const double T) |
| Create D matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getDVel (const double T) |
| Create D matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getEAcc (const double T) |
| Create E matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getEPos (const double T) |
| Create E matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position]. More... | |
| template<std::size_t t_number_of_integrators> | |
| static EIGENTOOLS_CONSTANT_SIZE_MATRIX | getEVel (const double T) |
| Create E matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position]. More... | |
Member Function Documentation
◆ getAAcc()
|
inlinestatic |
Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 67 of file triple_integrator.h.
◆ getAJerk()
|
inlinestatic |
Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 53 of file triple_integrator.h.
◆ getAPos()
|
inlinestatic |
Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 93 of file triple_integrator.h.
◆ getAsAcc()
|
inlinestatic |
Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time [in] Ts subsampling time
- Returns
- A matrix
Definition at line 118 of file triple_integrator.h.
◆ getAsPos()
|
inlinestatic |
Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time [in] Ts subsampling time
- Returns
- A matrix
Definition at line 146 of file triple_integrator.h.
◆ getAsVel()
|
inlinestatic |
Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time [in] Ts subsampling time
- Returns
- A matrix
Definition at line 132 of file triple_integrator.h.
◆ getAVel()
|
inlinestatic |
Create A matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 80 of file triple_integrator.h.
◆ getBAcc()
|
inlinestatic |
Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- B3 matrix
Definition at line 188 of file triple_integrator.h.
◆ getBJerk()
|
inlinestatic |
Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- B3 matrix
Definition at line 174 of file triple_integrator.h.
◆ getBPos()
|
inlinestatic |
Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- B3 matrix
Definition at line 214 of file triple_integrator.h.
◆ getBsAcc()
|
inlinestatic |
Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time [in] Ts subsampling time
- Returns
- B3 matrix
Definition at line 238 of file triple_integrator.h.
◆ getBsPos()
|
inlinestatic |
Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time [in] Ts subsampling time
- Returns
- B3 matrix
Definition at line 266 of file triple_integrator.h.
◆ getBsVel()
|
inlinestatic |
Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time [in] Ts subsampling time
- Returns
- B3 matrix
Definition at line 252 of file triple_integrator.h.
◆ getBVel()
|
inlinestatic |
Create B matrix of the model, suffix of the function name indicates the type of control [jerk, acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- B3 matrix
Definition at line 201 of file triple_integrator.h.
◆ getDAcc()
|
inlinestatic |
Create D matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 294 of file triple_integrator.h.
◆ getDPos()
|
inlinestatic |
Create D matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 316 of file triple_integrator.h.
◆ getDVel()
|
inlinestatic |
Create D matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 305 of file triple_integrator.h.
◆ getEAcc()
|
inlinestatic |
Create E matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 340 of file triple_integrator.h.
◆ getEPos()
|
inlinestatic |
Create E matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 362 of file triple_integrator.h.
◆ getEVel()
|
inlinestatic |
Create E matrix of the model, suffix of the function name indicates the type of control [acc = acceleration, vel = velocity, pos = position].
- Template Parameters
-
t_number_of_integrators number of integrators in the system
- Parameters
-
[in] T sampling time
- Returns
- A matrix
Definition at line 351 of file triple_integrator.h.
The documentation for this class was generated from the following file:
- core/include/rigid_body/triple_integrator.h
