Detailed Description
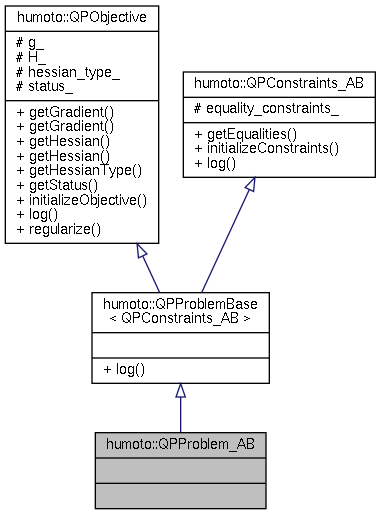
A QP problem with constraints of a specific type.
Definition at line 464 of file qp_problem.h.
#include <qp_problem.h>
Public Types | |
| enum | HessianType { HESSIAN_UNDEFINED = 0, HESSIAN_GENERIC = 1, HESSIAN_DIAGONAL = 2, HESSIAN_LOWER_TRIANGULAR = 3 } |
| enum | Status { UNDEFINED = 0, INITIALIZED = 1, MODIFIED = 2 } |
Public Member Functions | |
| const humoto::constraints::ContainerAB & | getEqualities () const |
| get container with equalities More... | |
| const Eigen::VectorXd & | getGradient () const |
| Const accessor. More... | |
| Eigen::VectorXd & | getGradient () |
| Non-const accessor. More... | |
| const Eigen::MatrixXd & | getHessian () const |
| Const accessor. More... | |
| Eigen::MatrixXd & | getHessian () |
| Non-const accessor. More... | |
| HessianType | getHessianType () const |
| Hessian type. More... | |
| Status | getStatus () const |
| Status of the objective. More... | |
| void | initializeConstraints (const HierarchyLevel &hlevel, const humoto::SolutionStructure &sol_structure) |
| Generates (general) objective containing all constraints on this level. More... | |
| void | initializeObjective (const humoto::HierarchyLevel &hlevel, const bool initialize_upper_triangular_part=true) |
| Generates (general) objective containing all constraints on this level. More... | |
| void | log (humoto::Logger &logger, const LogEntryName &parent=LogEntryName(), const std::string &name="qp_problem") const |
| Log a QP problem. More... | |
| void | regularize (const double regularization_factor) |
| Adds regularization to the Hessian. More... | |
Protected Attributes | |
| humoto::constraints::ContainerAB | equality_constraints_ |
| Eigen::VectorXd | g_ |
| Gradient vector. More... | |
| Eigen::MatrixXd | H_ |
| Hessian. More... | |
| HessianType | hessian_type_ |
| Status | status_ |
Member Enumeration Documentation
◆ HessianType
|
inherited |
| Enumerator | |
|---|---|
| HESSIAN_UNDEFINED | |
| HESSIAN_GENERIC | |
| HESSIAN_DIAGONAL | |
| HESSIAN_LOWER_TRIANGULAR | |
Definition at line 29 of file qp_problem.h.
◆ Status
|
inherited |
| Enumerator | |
|---|---|
| UNDEFINED | |
| INITIALIZED | |
| MODIFIED | |
Definition at line 22 of file qp_problem.h.
Member Function Documentation
◆ getEqualities()
|
inlineinherited |
get container with equalities
- Returns
- constraints container
Definition at line 394 of file qp_problem.h.
◆ getGradient() [1/2]
|
inlineinherited |
◆ getGradient() [2/2]
|
inlineinherited |
◆ getHessian() [1/2]
|
inlineinherited |
◆ getHessian() [2/2]
|
inlineinherited |
◆ getHessianType()
|
inlineinherited |
◆ getStatus()
|
inlineinherited |
◆ initializeConstraints()
|
inlineinherited |
Generates (general) objective containing all constraints on this level.
- Parameters
-
[in] hlevel hierarchy level [in] sol_structure structure of the solution
Definition at line 380 of file qp_problem.h.
◆ initializeObjective()
|
inlineinherited |
Generates (general) objective containing all constraints on this level.
- Parameters
-
[in] hlevel hierarchy level [in] initialize_upper_triangular_part
Definition at line 56 of file qp_problem.h.
◆ log()
|
inlineinherited |
Log a QP problem.
- Parameters
-
[in,out] logger logger [in] parent parent [in] name name
Definition at line 434 of file qp_problem.h.
◆ regularize()
|
inlineinherited |
Adds regularization to the Hessian.
- Parameters
-
[in] regularization_factor
Definition at line 168 of file qp_problem.h.
Member Data Documentation
◆ equality_constraints_
|
protectedinherited |
Definition at line 370 of file qp_problem.h.
◆ g_
|
protectedinherited |
Gradient vector.
Definition at line 43 of file qp_problem.h.
◆ H_
|
protectedinherited |
Hessian.
Definition at line 40 of file qp_problem.h.
◆ hessian_type_
|
protectedinherited |
Definition at line 45 of file qp_problem.h.
◆ status_
|
protectedinherited |
Definition at line 46 of file qp_problem.h.
The documentation for this class was generated from the following file:
- core/include/humoto/qp_problem.h
