Detailed Description
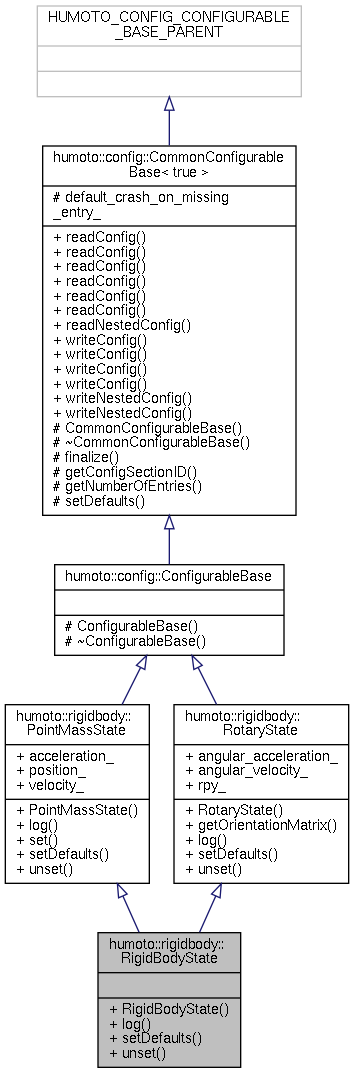
Class that groups together parameters related to a robot foot.
Definition at line 99 of file rigid_body_state.h.
#include <rigid_body_state.h>
Public Member Functions | |
| RigidBodyState () | |
| Default constructor. More... | |
| etools::Matrix3 | getOrientationMatrix () const |
| Return orientation as a 3d matrix. More... | |
| void | log (humoto::Logger &logger, const LogEntryName &parent=LogEntryName(), const std::string &name="rigid_body_state") const |
| Log. More... | |
| void | readConfig (t_Reader &reader, const bool crash_on_missing_entry=default_crash_on_missing_entry_) |
| Read configuration (assuming the configuration node to be in the root). More... | |
| void | readConfig (t_Reader &reader, const std::string &node_name, const bool crash_on_missing_entry=default_crash_on_missing_entry_) |
| Read configuration (assuming the configuration node to be in the root). More... | |
| void | readConfig (t_Reader &reader, const char *node_name, const bool crash_on_missing_entry=default_crash_on_missing_entry_) |
| Read configuration (assuming the configuration node to be in the root). More... | |
| void | readConfig (const std::string &file_name, const bool crash_on_missing_entry=default_crash_on_missing_entry_) |
| Read configuration (assuming the configuration node to be in the root). More... | |
| void | readConfig (const std::string &file_name, const std::string &node_name, const bool crash_on_missing_entry=default_crash_on_missing_entry_) |
| Read configuration (assuming the configuration node to be in the root). More... | |
| void | readConfig (const std::string &file_name, const char *node_name, const bool crash_on_missing_entry=default_crash_on_missing_entry_) |
| Read configuration (assuming the configuration node to be in the root). More... | |
| void | readNestedConfig (t_Reader &reader, const std::string &node_name, const bool crash_on_missing_entry=default_crash_on_missing_entry_) |
| Read nested configuration node. More... | |
| void | set (const etools::Vector3 position, const etools::Vector3 velocity=etools::Vector3::Zero(), const etools::Vector3 acceleration=etools::Vector3::Zero()) |
| Set state. More... | |
| void | setDefaults () |
| Initialize state (everything is set to zeros). More... | |
| void | unset () |
| Initialize state (everything is set to NaN). More... | |
| void | writeConfig (t_Writer &writer) const |
| Write configuration. More... | |
| void | writeConfig (t_Writer &writer, const std::string &node_name) const |
| Write configuration. More... | |
| void | writeConfig (const std::string &file_name) const |
| Write configuration. More... | |
| void | writeConfig (const std::string &file_name, const std::string &node_name) const |
| Write configuration. More... | |
| void | writeNestedConfig (t_Writer &writer) const |
| Write nested configuration node. More... | |
| void | writeNestedConfig (t_Writer &writer, const std::string &node_name) const |
| Write nested configuration node. More... | |
Public Attributes | |
| etools::Vector3 | acceleration_ |
| etools::Vector3 | angular_acceleration_ |
| etools::Vector3 | angular_velocity_ |
| etools::Vector3 | position_ |
| etools::Vector3 | rpy_ |
| etools::Vector3 | velocity_ |
Protected Member Functions | |
| virtual void | finalize () |
| This function is called automaticaly after reading a configuration file. Does nothing by default. More... | |
| virtual const std::string & | getConfigSectionID () const=0 |
| Return the default name of a configuration node corresponding to this class. More... | |
| virtual std::size_t | getNumberOfEntries () const=0 |
| Get number of entries in the corresponding configuration node. More... | |
Static Protected Attributes | |
| static const bool | default_crash_on_missing_entry_ |
Constructor & Destructor Documentation
◆ RigidBodyState()
|
inline |
Default constructor.
Definition at line 114 of file rigid_body_state.h.
Member Function Documentation
◆ finalize()
|
inlineprotectedvirtualinherited |
This function is called automaticaly after reading a configuration file. Does nothing by default.
Reimplemented in humoto::WeightedSimpleTaskBaseMixin< constraints::ConstraintsGIB< TaskBase > >, humoto::WeightedSimpleTaskBaseMixin< constraints::ConstraintsGILU< TaskBase > >, humoto::WeightedSimpleTaskBaseMixin< constraints::ConstraintsGIL< TaskBase > >, humoto::WeightedSimpleTaskBaseMixin< constraints::ConstraintsGIU< TaskBase > >, humoto::WeightedSimpleTaskBaseMixin< constraints::ConstraintsGIB0< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsAB< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsAB0< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsASU< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsASL< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsASLU< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsAU< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsAL< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsASB< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsALU< TaskBase > >, humoto::GeneralTaskBaseMixin< constraints::ConstraintsASB0< TaskBase > >, humoto::pepper_mpc::MPCParameters, humoto::pepper_mpc::MotionParameters, humoto::walking::RobotFootParameters, humoto::wpg04::MPCParameters, humoto::pepper_mpc::RobotParameters, humoto::pepper_ik::WBCParameters, humoto::pepper_ik::GeneralizedCoordinates< t_features >, humoto::wpg04::TaskCoPPosition, humoto::wpg04::TaskCoMVelocity, humoto::wpg04::TaskCoPVelocity, and humoto::wpg04::TaskTerminalConstraint.
◆ getConfigSectionID()
|
protectedpure virtualinherited |
Return the default name of a configuration node corresponding to this class.
- Returns
- the name
- Attention
- Implementation of this method is added automatically upon inclusion of define_accessors.h if HUMOTO_CONFIG_SECTION_ID is defined.
Implemented in humoto::TaskBase.
◆ getNumberOfEntries()
|
protectedpure virtualinherited |
Get number of entries in the corresponding configuration node.
- Returns
- number of entries
Implemented in humoto::ConfigurableOptimizationProblem.
◆ getOrientationMatrix()
|
inlineinherited |
Return orientation as a 3d matrix.
- Returns
- 3d orientation matrix
Definition at line 279 of file rotary_state.h.
◆ log()
|
inline |
Log.
- Parameters
-
[in,out] logger logger [in] parent parent [in] name name
Definition at line 147 of file rigid_body_state.h.
◆ readConfig() [1/6]
|
inlineinherited |
◆ readConfig() [2/6]
|
inlineinherited |
◆ readConfig() [3/6]
|
inlineinherited |
◆ readConfig() [4/6]
|
inlineinherited |
◆ readConfig() [5/6]
|
inlineinherited |
◆ readConfig() [6/6]
|
inlineinherited |
◆ readNestedConfig()
|
inlineinherited |
◆ set()
|
inlineinherited |
Set state.
- Parameters
-
[in] position [in] velocity [in] acceleration
Definition at line 75 of file point_mass_state.h.
◆ setDefaults()
|
inlinevirtual |
Initialize state (everything is set to zeros).
Reimplemented from humoto::rigidbody::PointMassState.
Definition at line 123 of file rigid_body_state.h.
◆ unset()
|
inline |
Initialize state (everything is set to NaN).
Definition at line 133 of file rigid_body_state.h.
◆ writeConfig() [1/4]
|
inlineinherited |
◆ writeConfig() [2/4]
|
inlineinherited |
◆ writeConfig() [3/4]
|
inlineinherited |
◆ writeConfig() [4/4]
|
inlineinherited |
◆ writeNestedConfig() [1/2]
|
inlineinherited |
◆ writeNestedConfig() [2/2]
|
inlineinherited |
Member Data Documentation
◆ acceleration_
|
inherited |
Definition at line 33 of file point_mass_state.h.
◆ angular_acceleration_
|
inherited |
Definition at line 239 of file rotary_state.h.
◆ angular_velocity_
|
inherited |
Definition at line 238 of file rotary_state.h.
◆ default_crash_on_missing_entry_
|
staticprotectedinherited |
◆ position_
|
inherited |
Definition at line 31 of file point_mass_state.h.
◆ rpy_
|
inherited |
Definition at line 237 of file rotary_state.h.
◆ velocity_
|
inherited |
Definition at line 32 of file point_mass_state.h.
The documentation for this class was generated from the following file:
- core/include/rigid_body/rigid_body_state.h
