Detailed Description
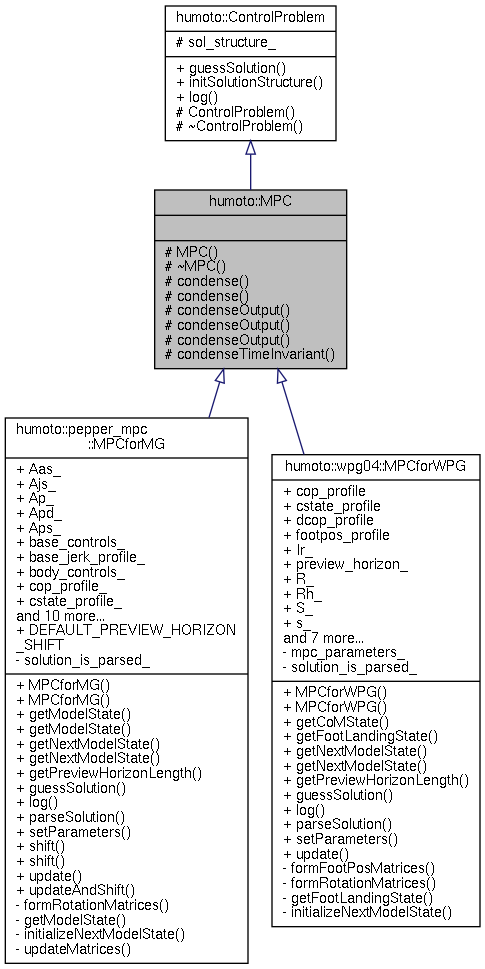
Abstract base class for Model Predictive Control problems.
Definition at line 97 of file control_problem.h.
#include <control_problem.h>
Public Member Functions | |
| virtual void | guessSolution (Solution &solution_guess, const Solution &old_solution) const |
| Guess solution. More... | |
| void | initSolutionStructure (humoto::Solution &solution) const |
| Initialize structure of the given solution based on the internally stored solution structure. More... | |
| virtual void | log (humoto::Logger &, const LogEntryName &, const std::string &) const =0 |
Protected Member Functions | |
| MPC () | |
| ~MPC () | |
| Protected destructor: prevent destruction of the child classes through a base pointer. More... | |
Static Protected Member Functions | |
| template<int t_num_vars, int t_num_controls, typename t_AMatrix , typename t_BMatrix , etools::MatrixSparsityType::Type t_bmatrix_sparsity_type> | |
| static void | condense (etools::GenericBlockMatrix< t_num_vars, t_num_vars > &S, etools::BlockMatrix< t_num_vars, t_num_controls, t_bmatrix_sparsity_type > &U, const std::vector< t_AMatrix > &A, const std::vector< t_BMatrix > &B) |
| Create the condensed matrices (S,U) of a Model Predictive Control problem such that X = S*x0 + U*u. More... | |
| template<typename t_AMatrix , typename t_BMatrix > | |
| static void | condense (Eigen::MatrixXd &S, Eigen::MatrixXd &U, const std::vector< t_AMatrix > &A, const std::vector< t_BMatrix > &B) |
| Create the condensed matrices (S,U) of a Model Predictive Control problem such that X = S*x0 + U*u. More... | |
| template<int t_num_vars, int t_num_outputs, typename t_DMatrix , typename t_EMatrix > | |
| static void | condenseOutput (etools::GenericBlockMatrix< t_num_outputs, t_num_vars > &Ox, std::vector< etools::LeftLowerTriangularBlockMatrix< t_num_outputs, etools::MatrixBlockSizeType::DYNAMIC > > &Ou, const std::vector< t_DMatrix > &D, const std::vector< t_EMatrix > &E, const etools::GenericBlockMatrix< t_num_vars, t_num_vars > &Ux, const std::vector< etools::LeftLowerTriangularBlockMatrix< t_num_vars, etools::MatrixBlockSizeType::DYNAMIC > > &Uu) |
| Condense output of the system. More... | |
| template<typename t_DMatrix , typename t_EMatrix > | |
| static void | condenseOutput (Eigen::MatrixXd &Ox, Eigen::MatrixXd &Ou, const t_DMatrix &D, const t_EMatrix &E, const Eigen::MatrixXd &Ux, const Eigen::MatrixXd &Uu) |
| Condense output of the system. More... | |
| template<int t_num_vars, int t_num_controls, int t_num_outputs, typename t_DMatrix , typename t_EMatrix > | |
| static void | condenseOutput (etools::GenericBlockMatrix< t_num_outputs, t_num_vars > &Ox, etools::LeftLowerTriangularBlockMatrix< t_num_outputs, t_num_controls > &Ou, const std::vector< t_DMatrix > &D, const std::vector< t_EMatrix > &E, const etools::GenericBlockMatrix< t_num_vars, t_num_vars > &Ux, const etools::LeftLowerTriangularBlockMatrix< t_num_vars, t_num_controls > &Uu) |
| Condense output of the system. More... | |
| static void | condenseTimeInvariant (Eigen::MatrixXd &S, Eigen::MatrixXd &U, const std::size_t preview_horizon_len, const Eigen::MatrixXd &A, const Eigen::MatrixXd &B) |
| Create the condensed matrices (S,U) of a Time Invariant (constant A,B) Model Predictive Control problem such that X = S*x0 + U*u. More... | |
Protected Attributes | |
| SolutionStructure | sol_structure_ |
Constructor & Destructor Documentation
◆ ~MPC()
|
inlineprotected |
Protected destructor: prevent destruction of the child classes through a base pointer.
Definition at line 104 of file control_problem.h.
◆ MPC()
|
inlineprotected |
Definition at line 105 of file control_problem.h.
Member Function Documentation
◆ condense() [1/2]
|
inlinestaticprotected |
Create the condensed matrices (S,U) of a Model Predictive Control problem such that X = S*x0 + U*u.
- Template Parameters
-
t_num_vars number of variables t_num_controls number of controls t_AMatrix A matrix, should be an Eigen matrix or a scalar t_BMatrix B matrix, should be an Eigen matrix
- Parameters
-
[out] S [out] U [in] A [in] B
Definition at line 321 of file control_problem.h.
◆ condense() [2/2]
|
inlinestaticprotected |
Create the condensed matrices (S,U) of a Model Predictive Control problem such that X = S*x0 + U*u.
- Template Parameters
-
t_AMatrix A matrix, should be an Eigen matrix or a scalar t_BMatrix B matrix, should be an Eigen matrix
- Parameters
-
[out] S [out] U [in] A [in] B
Definition at line 378 of file control_problem.h.
◆ condenseOutput() [1/3]
|
inlinestaticprotected |
Condense output of the system.
output = Ox*x0 + Ou*(u0,...,uN)
- Template Parameters
-
t_num_vars number of state variables t_num_outputs number of output variables t_DMatrix D matrix, should be an Eigen matrix or a scalar t_EMatrix E matrix, should be an Eigen matrix or a scalar
- Parameters
-
[out] Ox matrix Ox [out] Ou vector of Ou matrices [in] D vector of D matrices [in] E vector of E matrices [in] Ux matrix Ux [in] Uu vector of Uu matrices
Definition at line 129 of file control_problem.h.
◆ condenseOutput() [2/3]
|
inlinestaticprotected |
Condense output of the system.
output = Ox*x0 + Ou*(u0,...,uN)
- Template Parameters
-
t_num_vars number of state variables t_num_controls number of control variables t_num_outputs number of output variables t_DMatrix D matrix, should be an Eigen matrix or a scalar t_EMatrix E matrix, should be an Eigen matrix or a scalar
- Parameters
-
[out] Ox matrix Ox [out] Ou matrix Ou [in] D D matrix [in] E E matrix [in] Ux matrix Ux [in] Uu matrix Uu
Definition at line 209 of file control_problem.h.
◆ condenseOutput() [3/3]
|
inlinestaticprotected |
Condense output of the system.
output = Ox*x0 + Ou*(u0,...,uN)
- Template Parameters
-
t_num_vars number of state variables t_num_controls number of control variables t_num_outputs number of output variables t_DMatrix D matrix, should be an Eigen matrix or a scalar t_EMatrix E matrix, should be an Eigen matrix or a scalar
- Parameters
-
[out] Ox matrix Ox [out] Ou matrix Ou [in] D vector of D matrices [in] E vector of E matrices [in] Ux matrix Ux [in] Uu matrix Uu
Definition at line 268 of file control_problem.h.
◆ condenseTimeInvariant()
|
inlinestaticprotected |
Create the condensed matrices (S,U) of a Time Invariant (constant A,B) Model Predictive Control problem such that X = S*x0 + U*u.
- Parameters
-
[out] S [out] U [in] preview_horizon_len length of the preview horizon [in] A [in] B
Definition at line 428 of file control_problem.h.
◆ guessSolution()
|
inlinevirtualinherited |
Guess solution.
- Parameters
-
[out] solution_guess solution guess [in] old_solution old solution
- Attention
- This method is called automatically. Can (and often should) be redefined in derived classes.
Reimplemented in humoto::pepper_mpc::MPCforMG, and humoto::wpg04::MPCforWPG.
Definition at line 82 of file control_problem.h.
◆ initSolutionStructure()
|
inlineinherited |
Initialize structure of the given solution based on the internally stored solution structure.
- Parameters
-
[out] solution solution
- Attention
- This method is called automatically.
Definition at line 64 of file control_problem.h.
◆ log()
|
pure virtualinherited |
Member Data Documentation
◆ sol_structure_
|
protectedinherited |
Definition at line 43 of file control_problem.h.
The documentation for this class was generated from the following file:
- core/include/humoto/control_problem.h
