Detailed Description
template<int t_features>
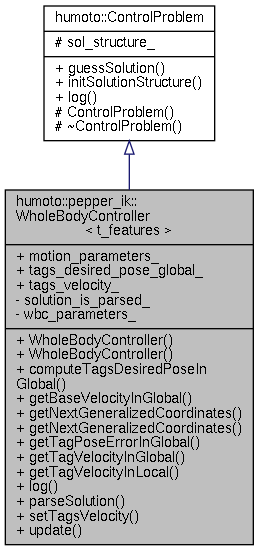
class humoto::pepper_ik::WholeBodyController< t_features >
Whole body controller.
- Template Parameters
-
t_features features identifying the model
Definition at line 23 of file whole_body_controller.h.
#include <whole_body_controller.h>
Public Member Functions | |
| WholeBodyController () | |
| Constructor. More... | |
| WholeBodyController (const humoto::pepper_ik::WBCParameters &wbc_parameters) | |
| Constructor. More... | |
| void | computeTagsDesiredPoseInGlobal (const humoto::pepper_ik::Model< t_features > &model) |
| Get desired tag(s) pose in global frame. More... | |
| etools::Vector6 | getBaseVelocityInGlobal (const humoto::pepper_ik::Model< t_features > &model) |
| Get base velocity in global frame. More... | |
| humoto::pepper_ik::GeneralizedCoordinates< t_features > | getNextGeneralizedCoordinates (const humoto::Solution &solution, const humoto::pepper_ik::Model< t_features > &model) |
| Get next model state. More... | |
| humoto::pepper_ik::GeneralizedCoordinates< t_features > | getNextGeneralizedCoordinates (const humoto::pepper_ik::Model< t_features > &model) const |
| Get next model state. More... | |
| etools::Vector6 | getTagPoseErrorInGlobal (const humoto::pepper_ik::Model< t_features > &model, const std::string &tag_name) const |
| Get tag pose error in global frame. More... | |
| Eigen::VectorXd | getTagVelocityInGlobal (const humoto::pepper_ik::Model< t_features > &model, const std::string &tag_name, const etools::Vector6 &tag_velocity_local, const rbdl::SpatialType::Type &spatial_type) const |
| Get velocity in global frame. More... | |
| Eigen::VectorXd | getTagVelocityInLocal (const std::string &tag_name, const rbdl::SpatialType::Type &spatial_type) const |
| Get tag velocity in local frame (vx, vy, vz, wx, wy, wz) More... | |
| virtual void | guessSolution (Solution &solution_guess, const Solution &old_solution) const |
| Guess solution. More... | |
| void | initSolutionStructure (humoto::Solution &solution) const |
| Initialize structure of the given solution based on the internally stored solution structure. More... | |
| void | log (humoto::Logger &logger, const LogEntryName &parent=LogEntryName(), const std::string &name="wbc") const |
| Log. More... | |
| void | parseSolution (const humoto::Solution &solution) |
| Process solution. More... | |
| void | setTagsVelocity (const std::map< std::string, etools::Vector6 > &tag_velocity) |
| Set tag(s) velocity. More... | |
| ControlProblemStatus::Status | update (humoto::pepper_ik::Model< t_features > &model, const humoto::pepper_ik::MotionParameters &motion_parameters) |
| Update control problem. More... | |
Public Attributes | |
| humoto::pepper_ik::MotionParameters | motion_parameters_ |
| std::map< std::string, etools::Vector6 > | tags_desired_pose_global_ |
| std::map< std::string, etools::Vector6 > | tags_velocity_ |
Protected Attributes | |
| SolutionStructure | sol_structure_ |
Private Attributes | |
| bool | solution_is_parsed_ |
| humoto::pepper_ik::WBCParameters | wbc_parameters_ |
Constructor & Destructor Documentation
◆ WholeBodyController() [1/2]
|
inline |
Constructor.
Definition at line 221 of file whole_body_controller.h.
◆ WholeBodyController() [2/2]
|
inlineexplicit |
Member Function Documentation
◆ computeTagsDesiredPoseInGlobal()
|
inline |
Get desired tag(s) pose in global frame.
- Parameters
-
[in] model
Definition at line 161 of file whole_body_controller.h.
◆ getBaseVelocityInGlobal()
|
inline |
Get base velocity in global frame.
- Parameters
-
[in] model
- Returns
- base_velocity
Definition at line 92 of file whole_body_controller.h.
◆ getNextGeneralizedCoordinates() [1/2]
|
inline |
Get next model state.
- Parameters
-
[in] solution solution [in] model model
- Returns
- next model state.
Definition at line 285 of file whole_body_controller.h.
◆ getNextGeneralizedCoordinates() [2/2]
|
inline |
Get next model state.
- Parameters
-
[in] model model
- Returns
- next model state.
Definition at line 309 of file whole_body_controller.h.
◆ getTagPoseErrorInGlobal()
|
inline |
Get tag pose error in global frame.
- Parameters
-
[in] model [in] tag_name
- Returns
- error in pose in global frame
Definition at line 195 of file whole_body_controller.h.
◆ getTagVelocityInGlobal()
|
inline |
Get velocity in global frame.
- Parameters
-
[in] model [in] tag_name [in] tag_velocity_local [in] spatial_type
- Returns
- velocity in global frame
Definition at line 110 of file whole_body_controller.h.
◆ getTagVelocityInLocal()
|
inline |
Get tag velocity in local frame (vx, vy, vz, wx, wy, wz)
- Parameters
-
[in] tag_name [in] spatial_type
- Returns
- velocity in local frame
Definition at line 45 of file whole_body_controller.h.
◆ guessSolution()
|
inlinevirtualinherited |
Guess solution.
- Parameters
-
[out] solution_guess solution guess [in] old_solution old solution
- Attention
- This method is called automatically. Can (and often should) be redefined in derived classes.
Reimplemented in humoto::pepper_mpc::MPCforMG, and humoto::wpg04::MPCforWPG.
Definition at line 82 of file control_problem.h.
◆ initSolutionStructure()
|
inlineinherited |
Initialize structure of the given solution based on the internally stored solution structure.
- Parameters
-
[out] solution solution
- Attention
- This method is called automatically.
Definition at line 64 of file control_problem.h.
◆ log()
|
inlinevirtual |
Log.
- Parameters
-
[in,out] logger logger [in] parent parent [in] name name
Implements humoto::ControlProblem.
Definition at line 324 of file whole_body_controller.h.
◆ parseSolution()
|
inline |
Process solution.
- Parameters
-
[in] solution solution
Definition at line 270 of file whole_body_controller.h.
◆ setTagsVelocity()
|
inline |
Set tag(s) velocity.
- Parameters
-
[in] tag_velocity
Definition at line 80 of file whole_body_controller.h.
◆ update()
|
inline |
Update control problem.
- Parameters
-
[in] model model of the system [in] motion_parameters
- Returns
- ControlProblemStatus::OK/ControlProblemStatusSTOPPED
Definition at line 248 of file whole_body_controller.h.
Member Data Documentation
◆ motion_parameters_
| humoto::pepper_ik::MotionParameters humoto::pepper_ik::WholeBodyController< t_features >::motion_parameters_ |
Definition at line 31 of file whole_body_controller.h.
◆ sol_structure_
|
protectedinherited |
Definition at line 43 of file control_problem.h.
◆ solution_is_parsed_
|
private |
Definition at line 26 of file whole_body_controller.h.
◆ tags_desired_pose_global_
| std::map<std::string, etools::Vector6> humoto::pepper_ik::WholeBodyController< t_features >::tags_desired_pose_global_ |
Definition at line 33 of file whole_body_controller.h.
◆ tags_velocity_
| std::map<std::string, etools::Vector6> humoto::pepper_ik::WholeBodyController< t_features >::tags_velocity_ |
Definition at line 32 of file whole_body_controller.h.
◆ wbc_parameters_
|
private |
Definition at line 27 of file whole_body_controller.h.
The documentation for this class was generated from the following file:
- modules/pepper_ik/include/pepper_ik/whole_body_controller.h
