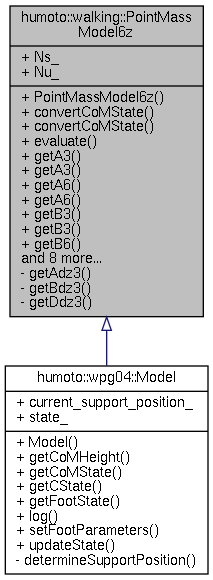
Detailed Description
Point Mass Model with piece-wise constant CoP velocity.
This class generates matrices of the following systems:
1) controlled by position of the CoP c(k+1) = A c(k) + B z(k+1) zdot(k) = D c(k) + E z(k+1)
2) controlled by velocity of the CoP c(k+1) = Adz c(k) + Bdz dz(k+1) z(k) = Ddz c(k)
- Todo:
- It can be faster if A,B are computed directly as derived in documentation.
Definition at line 33 of file point_mass_model_6z.h.
#include <point_mass_model_6z.h>
Public Member Functions | |
| PointMassModel6z () | |
| Constructor. More... | |
Static Public Member Functions | |
| static humoto::rigidbody::PointMassState | convertCoMState (const etools::Vector6 &cstate, const double com_height) |
| Converts given cstate vector to CoM state. More... | |
| static etools::Vector6 | convertCoMState (const humoto::rigidbody::PointMassState &com_state) |
| Get cstate. More... | |
| static humoto::rigidbody::PointMassState | evaluate (const double Ts, const double T, const double com_height, const etools::Vector6 &cstate, const etools::Vector2 &control) |
| static etools::Matrix3 | getA3 (const double T, const double omega, const double Tsample) |
| Create A matrix of final model. More... | |
| static etools::Matrix3 | getA3 (const double T, const double omega) |
| Create A matrix of final model. More... | |
| static etools::Matrix6 | getA6 (const double T, const double omega, const double Tsample) |
| Create A matrix of final model. More... | |
| static etools::Matrix6 | getA6 (const double T, const double omega) |
| Create A matrix of final model. More... | |
| static etools::Vector3 | getB3 (const double T, const double omega, const double Tsample) |
| Create B matrix of final model. More... | |
| static etools::Vector3 | getB3 (const double T, const double omega) |
| Create A matrix of final model. More... | |
| static etools::Matrix6x2 | getB6 (const double T, const double omega, const double Tsample) |
| Create B matrix of final model. More... | |
| static etools::Matrix6x2 | getB6 (const double T, const double omega) |
| Create B matrix of final model. More... | |
| static etools::Matrix1x3 | getD3 (const double T, const double omega) |
| Create D matrix of final model. More... | |
| static etools::Matrix2x6 | getD6 (const double T, const double omega) |
| Create D matrix of final model. More... | |
| static etools::Matrix2x6 | getDcpv6 (const double omega) |
| Create ksi matrix. More... | |
| static etools::Matrix2x6 | getDdz6 (const double com_height) |
| Create Ddz6 matrix. More... | |
| static double | getE3 (const double T) |
| Create E matrix of final model. More... | |
| static etools::Matrix2 | getE6 (const double T, const double omega) |
| Create E matrix of final model. More... | |
| static double | getOmega (const double com_height) |
Public Attributes | |
| const std::size_t | Ns_ |
| Number of state variables. More... | |
| const int | Nu_ |
| Number of control variables. More... | |
Static Private Member Functions | |
| static etools::Matrix3 | getAdz3 (const double T, const double omega) |
| Create A matrix of unrefined model. More... | |
| static etools::Vector3 | getBdz3 (const double T, const double omega) |
| Create B matrix of unrefined model. More... | |
| static etools::Matrix1x3 | getDdz3 (const double omega) |
| Create D matrix of unrefined model. More... | |
Constructor & Destructor Documentation
◆ PointMassModel6z()
|
inline |
Constructor.
Definition at line 101 of file point_mass_model_6z.h.
Member Function Documentation
◆ convertCoMState() [1/2]
|
inlinestatic |
Converts given cstate vector to CoM state.
- Returns
- CoM state
Definition at line 117 of file point_mass_model_6z.h.
◆ convertCoMState() [2/2]
|
inlinestatic |
Get cstate.
Definition at line 134 of file point_mass_model_6z.h.
◆ evaluate()
|
inlinestatic |
Definition at line 147 of file point_mass_model_6z.h.
◆ getA3() [1/2]
|
inlinestatic |
Create A matrix of final model.
Definition at line 169 of file point_mass_model_6z.h.
◆ getA3() [2/2]
|
inlinestatic |
Create A matrix of final model.
Definition at line 183 of file point_mass_model_6z.h.
◆ getA6() [1/2]
|
inlinestatic |
Create A matrix of final model.
Definition at line 192 of file point_mass_model_6z.h.
◆ getA6() [2/2]
|
inlinestatic |
Create A matrix of final model.
Definition at line 206 of file point_mass_model_6z.h.
◆ getAdz3()
|
inlinestaticprivate |
Create A matrix of unrefined model.
Definition at line 39 of file point_mass_model_6z.h.
◆ getB3() [1/2]
|
inlinestatic |
Create B matrix of final model.
Definition at line 215 of file point_mass_model_6z.h.
◆ getB3() [2/2]
|
inlinestatic |
Create A matrix of final model.
Definition at line 227 of file point_mass_model_6z.h.
◆ getB6() [1/2]
|
inlinestatic |
Create B matrix of final model.
Definition at line 236 of file point_mass_model_6z.h.
◆ getB6() [2/2]
|
inlinestatic |
Create B matrix of final model.
Definition at line 251 of file point_mass_model_6z.h.
◆ getBdz3()
|
inlinestaticprivate |
Create B matrix of unrefined model.
Definition at line 59 of file point_mass_model_6z.h.
◆ getD3()
|
inlinestatic |
Create D matrix of final model.
Definition at line 260 of file point_mass_model_6z.h.
◆ getD6()
|
inlinestatic |
Create D matrix of final model.
Definition at line 272 of file point_mass_model_6z.h.
◆ getDcpv6()
|
inlinestatic |
Create ksi matrix.
- Note
- Used to generate matrix for terminal constraint
Definition at line 319 of file point_mass_model_6z.h.
◆ getDdz3()
|
inlinestaticprivate |
Create D matrix of unrefined model.
Definition at line 79 of file point_mass_model_6z.h.
◆ getDdz6()
|
inlinestatic |
Create Ddz6 matrix.
Definition at line 304 of file point_mass_model_6z.h.
◆ getE3()
Create E matrix of final model.
Definition at line 286 of file point_mass_model_6z.h.
◆ getE6()
|
inlinestatic |
Create E matrix of final model.
Definition at line 295 of file point_mass_model_6z.h.
◆ getOmega()
Definition at line 106 of file point_mass_model_6z.h.
Member Data Documentation
◆ Ns_
| const std::size_t humoto::walking::PointMassModel6z::Ns_ |
Number of state variables.
Definition at line 91 of file point_mass_model_6z.h.
◆ Nu_
| const int humoto::walking::PointMassModel6z::Nu_ |
Number of control variables.
Definition at line 94 of file point_mass_model_6z.h.
The documentation for this class was generated from the following file:
- core/include/walking/point_mass_model_6z.h
